Code View
````python
````
Result
````planetext
array(\[\[0.76959259, 0.03105338\],
\[0.91933906, 0.8980492 \],
\[0.74919767, 0.46775453\],
\[0.66010482, 0.70532455\],
\[0.07347433, 0.31437638\],
\[0.52162755, 0.75475037\],
\[0.07618824, 0.5595569 \],
\[0.37694104, 0.88389 \],
\[0.59261356, 0.49140373\],
\[0.11567152, 0.32084966\],
\[0.81627506, 0.7724125 \],
\[0.7708446 , 0.98667885\],
\[0.57884267, 0.92658698\],
\[0.48815338, 0.04666865\],
\[0.07971729, 0.56926156\],
\[0.93371788, 0.20473364\],
\[0.71241481, 0.68994675\],
\[0.69855141, 0.55690579\],
\[0.87081581, 0.48218263\],
\[0.73239668, 0.47015934\],
\[0.48234206, 0.38374233\],
\[0.51407113, 0.3925697 \],
\[0.97608349, 0.58044996\],
\[0.67676596, 0.51393561\],
\[0.37059459, 0.99168193\],
\[0.17015263, 0.17250751\],
\[0.6980668 , 0.47156525\],
\[0.9674704 , 0.29847506\],
\[0.85297608, 0.15389296\],
\[0.99135256, 0.95353731\],
\[0.75749781, 0.05744834\],
\[0.5850026 , 0.69425312\],
\[0.35572734, 0.77261987\],
\[0.96259553, 0.10738437\],
\[0.0178066 , 0.68856146\],
\[0.78219693, 0.6523648 \],
\[0.18744908, 0.73438952\],
\[0.19713904, 0.56662014\],
\[0.11656314, 0.50708698\],
\[0.33800968, 0.03634445\],
\[0.64802194, 0.90416709\],
\[0.7668028 , 0.7619133 \],
\[0.55338936, 0.78892134\],
\[0.20716839, 0.95280491\],
\[0.47688275, 0.30063862\],
\[0.22233577, 0.02612442\],
\[0.21021643, 0.66526042\],
\[0.87039248, 0.75634555\],
\[0.91421121, 0.60350262\],
\[0.32014712, 0.61909491\],
\[0.03320721, 0.69900356\],
\[0.0806021 , 0.68826953\],
\[0.52828811, 0.78636528\],
\[0.49048742, 0.60616199\],
\[0.07021355, 0.64982408\],
\[0.21773879, 0.55571391\],
\[0.02119119, 0.62099936\],
\[0.75589808, 0.88236869\],
\[0.99479197, 0.98599938\],
\[0.35444256, 0.84292181\],
\[0.90941177, 0.30758414\],
\[0.87616741, 0.18060184\],
\[0.22973575, 0.50353087\],
\[0.33569227, 0.82710827\],
\[0.03575231, 0.86915894\],
\[0.59710596, 0.91274408\],
\[0.61854338, 0.06007 \],
\[0.69497861, 0.26505075\],
\[0.80347052, 0.93909288\],
\[0.8998602 , 0.34498986\],
\[0.96359265, 0.66780466\],
\[0.6180583 , 0.36145526\],
\[0.22507441, 0.24977 \],
\[0.82067222, 0.65858647\],
\[0.26533719, 0.50457457\],
\[0.20615695, 0.52028333\],
\[0.78530409, 0.23287443\],
\[0.81894409, 0.32542015\],
\[0.66607148, 0.0717416 \],
\[0.15435642, 0.57144805\],
\[0.60568206, 0.62824524\],
\[0.40981871, 0.51319754\],
\[0.14660118, 0.14759826\],
\[0.89091339, 0.12148139\],
\[0.48159329, 0.76667587\],
\[0.73766975, 0.76237422\],
\[0.32449576, 0.11193535\],
\[0.05351455, 0.37051478\],
\[0.15487227, 0.0884276 \],
\[0.40902546, 0.73216362\],
\[0.6227993 , 0.54298886\],
\[0.70489165, 0.60729615\],
\[0.43506953, 0.26510733\],
\[0.17818975, 0.41551925\],
\[0.07820619, 0.31987945\],
\[0.27646196, 0.00825832\],
\[0.30999502, 0.67284126\],
\[0.6372436 , 0.48780002\],
\[0.66962877, 0.44225145\],
\[0.48185839, 0.17663244\]\])
````
SOM 파라미터 설정
````python
map_width = 10
map_height = 10
lr = 0.1
num_iterations = 1000
# map_width = 2
# map_height = 2
# lr = 0.1
# num_iterations = 1000
````
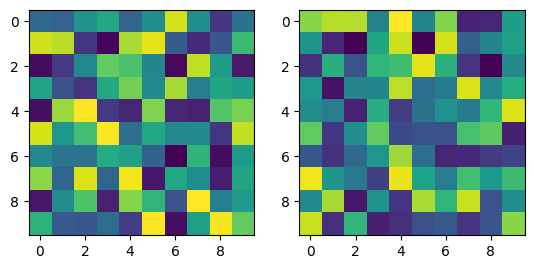
SOM 초기화
````python
som_map = np.random.rand(map_width, map_height, 2)
print(som_map.shape)
fig, (ax1, ax2) = plt.subplots(1, 2)
ax1.imshow(som_map[:,:,0])
ax2.imshow(som_map[:,:,1])
plt.show()
````
SOM 학습
````python
for i in range(num_iterations):
# 랜덤한 입력 데이터 선택
input_data = data[np.random.choice(data.shape[0])]
# 가장 유사한 뉴런 찾기
# 3D som_map과 input_data의 차이^2를 구하여 z축으로 모두 합한 거리
distances = np.sum((som_map - input_data) ** 2, axis=2)
# 위에서 구한 z축의 거리들 중 가장 작은 뉴런
winner = np.argmin(distances)
# 3D z축에서 선택된 가장 작은 뉴런을 2D map으로 맵핑한 좌표
x, y = np.unravel_index(winner, (map_width, map_height))
# 학습률 계산
learning_rate = lr * (1 - i/num_iterations)
# 뉴런 가중치 업데이트
for j in range(map_width):
for k in range(map_height):
dist = np.sqrt((x-j)**2 + (y-k)**2)
if dist < 3:
som_map[j, k] += learning_rate * (input_data - som_map[j, k])
````
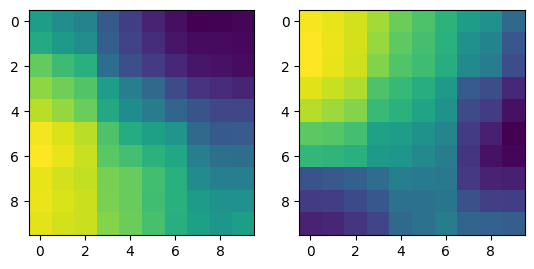
SOM 시각화
````python
print(som_map.shape)
fig, (ax1, ax2) = plt.subplots(1, 2)
ax1.imshow(som_map[:,:,0])
ax2.imshow(som_map[:,:,1])
plt.show()
````
### 참고[¶]()
- ChatGPT
### SOM [¶]()