You cannot select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
|
|
1 year ago | |
|---|---|---|
| Data | 1 year ago | |
| images | 1 year ago | |
| README.md | 1 year ago | |
| model_epoch_0.pth | 1 year ago | |
| model_epoch_10.pth | 1 year ago | |
| model_epoch_20.pth | 1 year ago | |
| model_epoch_30.pth | 1 year ago | |
| model_epoch_40.pth | 1 year ago | |
| model_epoch_50.pth | 1 year ago | |
| model_epoch_60.pth | 1 year ago | |
| model_epoch_70.pth | 1 year ago | |
| model_epoch_80.pth | 1 year ago | |
| model_epoch_90.pth | 1 year ago | |
| resnet.ipynb | 1 year ago | |
README.md
| layout | title | subtitle |
|---|---|---|
| default | 13. ResNet | Deep Learning |
ResNet
- 산업인공지능학과 대학원 2022254026 김홍열
ResNet이란?
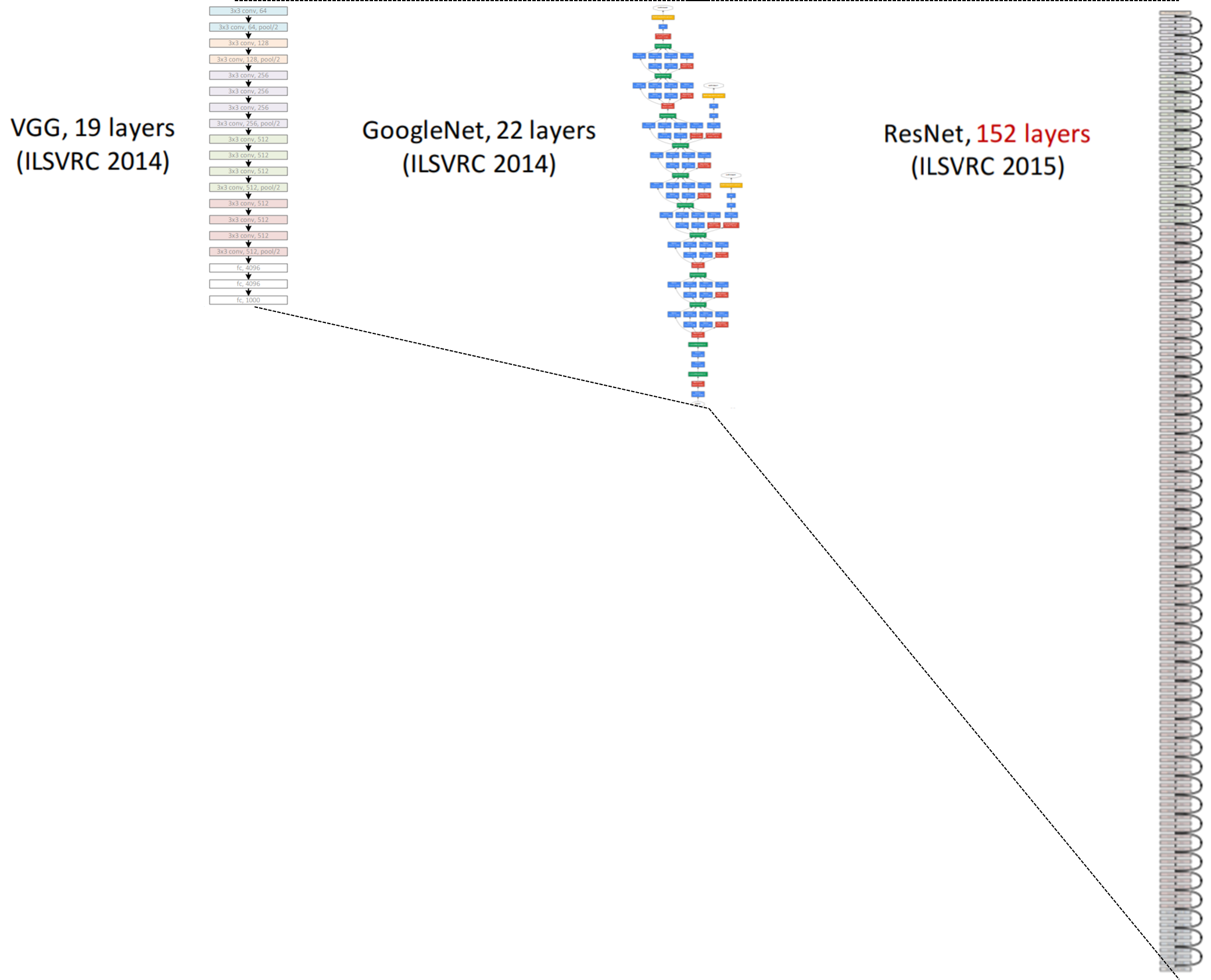
ResNet(Residual Network)는 딥러닝에서 사용되는 컨볼루션 신경망(CNN) 구조이다.
2015년 마이크로소프트 연구팀에 의해 개발되었으며, 깊은 신경망을 효율적으로 학습시키기 위해 "잔차 학습(Residual Learning)" 개념을 도입했다.
이 아이디어는 신경망의 층을 거쳐가는 동안 신호가 약화되거나 왜곡되는 것을 방지하기 위해, 입력을 층의 출력에 직접 추가한 것이다.
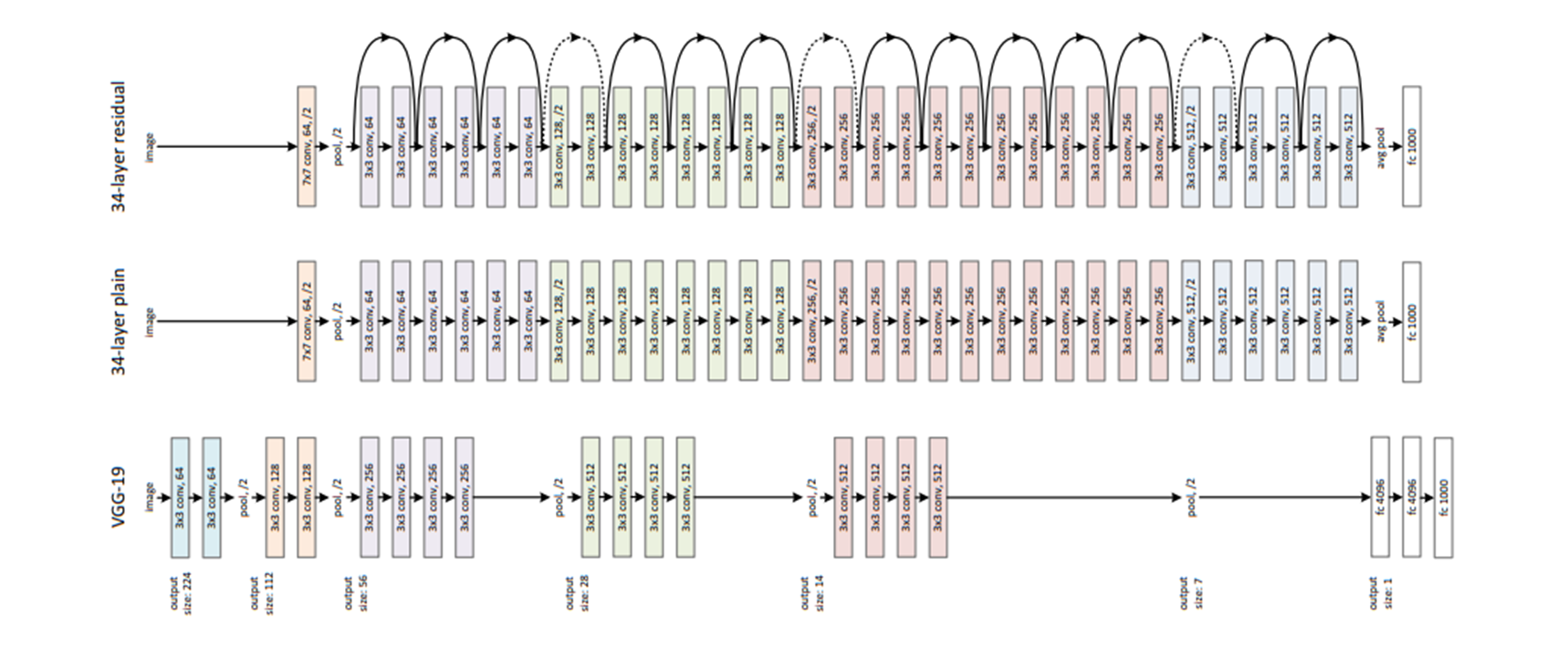
ResNet의 구조
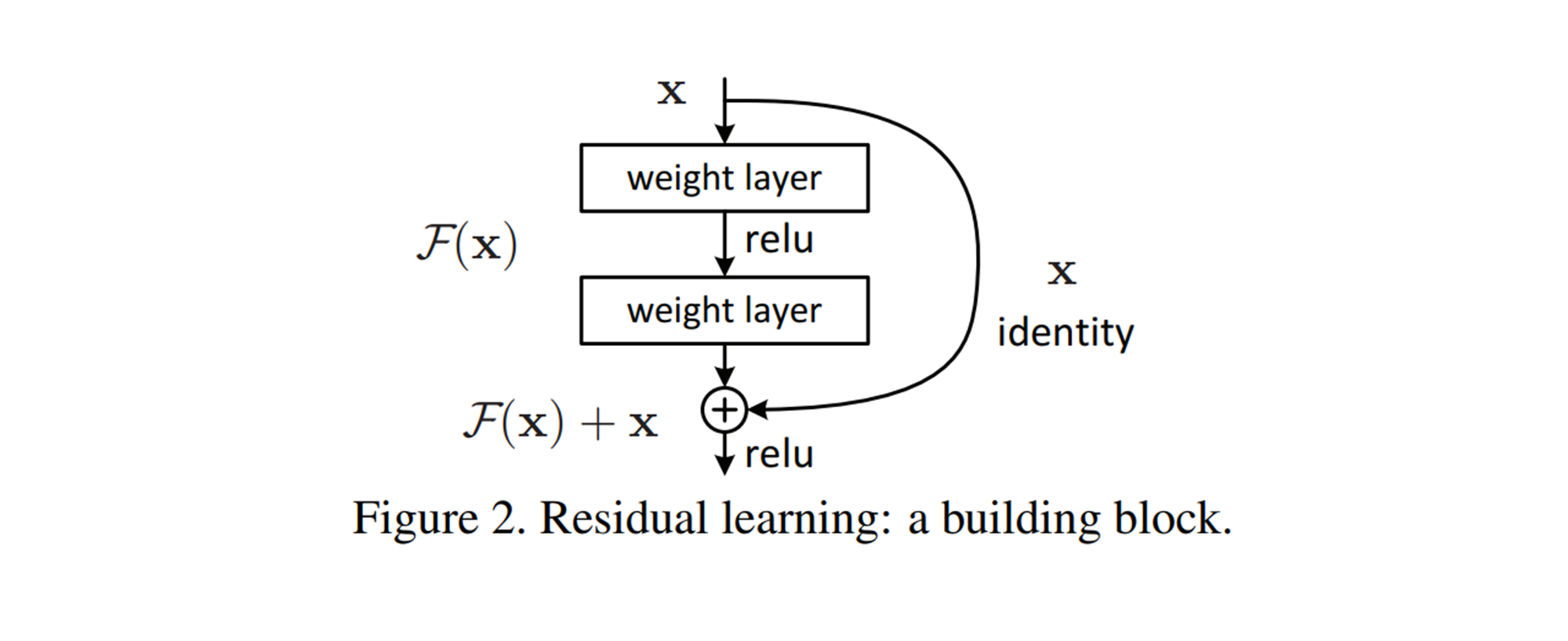
ResNet의 핵심 구조는 "잔차 블록(Residual Block)"이다.
이 블록은 입력을 블록의 출력에 더하는 스킵 연결(skip connection)을 포함한다.
이를 통해 네트워크는 학습해야 할 목표 함수를 보다 쉽게 최적화할 수 있다.
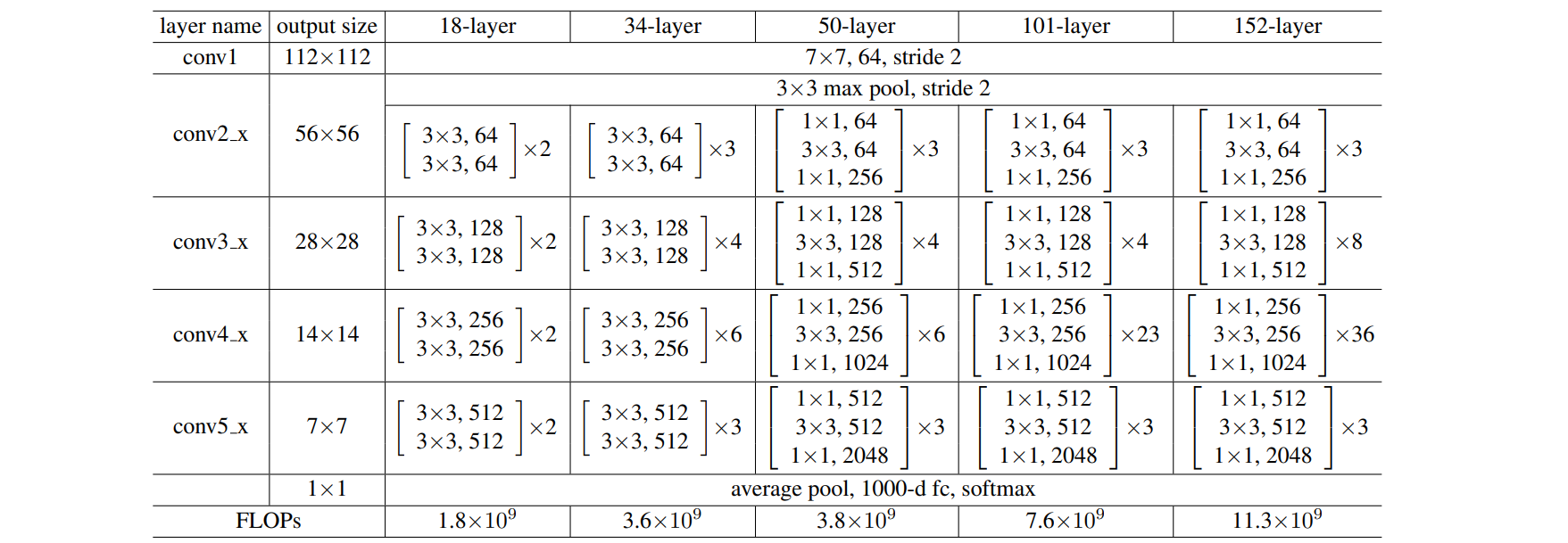
ResNet은 깊이에 따라 여러 버전이 있으며, ResNet-34, ResNet-50, ResNet-101, ResNet-152 등이 일반적이다.
여기서 숫자는 네트워크에 있는 층의 수를 나타낸다.
예제 코드¶
Import
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.init as init
import torchvision
import torchvision.datasets as datasets
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import numpy as np
import matplotlib.pyplot as plt
import tqdm
from tqdm.auto import trange
Hyper Parameters
# 하이퍼파라미터 준비
batch_size = 50
learning_rate = 0.0002
num_epoch = 100
예제 코드¶
Dataset(CIFAR-10)
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# define dataset
cifar10_train = datasets.CIFAR10(root="./Data/", train=True, transform=transform, target_transform=None, download=True)
cifar10_test = datasets.CIFAR10(root="./Data/", train=False, transform=transform, target_transform=None, download=True)
# define loader
train_loader = DataLoader(cifar10_train,batch_size=batch_size, shuffle=True, num_workers=2, drop_last=True)
test_loader = DataLoader(cifar10_test,batch_size=batch_size, shuffle=False, num_workers=2, drop_last=True)
# define classes
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
예제 코드¶
Basic Module
def conv_block_1(in_dim,out_dim, activation,stride=1):
model = nn.Sequential(
nn.Conv2d(in_dim,out_dim, kernel_size=1, stride=stride),
nn.BatchNorm2d(out_dim),
activation,
)
return model
def conv_block_3(in_dim,out_dim, activation, stride=1):
model = nn.Sequential(
nn.Conv2d(in_dim,out_dim, kernel_size=3, stride=stride, padding=1),
nn.BatchNorm2d(out_dim),
activation,
)
return model
Bottleneck Module
class BottleNeck(nn.Module):
def __init__(self,in_dim,mid_dim,out_dim,activation,down=False):
super(BottleNeck,self).__init__()
self.down=down
# 특성지도의 크기가 감소하는 경우
if self.down:
self.layer = nn.Sequential(
conv_block_1(in_dim,mid_dim,activation,stride=2),
conv_block_3(mid_dim,mid_dim,activation,stride=1),
conv_block_1(mid_dim,out_dim,activation,stride=1),
)
# 특성지도 크기 + 채널을 맞춰주는 부분
self.downsample = nn.Conv2d(in_dim,out_dim,kernel_size=1,stride=2)
# 특성지도의 크기가 그대로인 경우
else:
self.layer = nn.Sequential(
conv_block_1(in_dim,mid_dim,activation,stride=1),
conv_block_3(mid_dim,mid_dim,activation,stride=1),
conv_block_1(mid_dim,out_dim,activation,stride=1),
)
# 채널을 맞춰주는 부분
self.dim_equalizer = nn.Conv2d(in_dim,out_dim,kernel_size=1)
def forward(self,x):
if self.down:
downsample = self.downsample(x)
out = self.layer(x)
out = out + downsample
else:
out = self.layer(x)
if x.size() is not out.size():
x = self.dim_equalizer(x)
out = out + x
return out
ResNet-50 Network
# 50-layer
class ResNet(nn.Module):
def __init__(self, base_dim, num_classes=10):
super(ResNet, self).__init__()
self.activation = nn.ReLU()
self.layer_1 = nn.Sequential(
nn.Conv2d(3,base_dim,7,2,3),
nn.ReLU(),
nn.MaxPool2d(3,2,1),
)
self.layer_2 = nn.Sequential(
BottleNeck(base_dim,base_dim,base_dim*4,self.activation),
BottleNeck(base_dim*4,base_dim,base_dim*4,self.activation),
BottleNeck(base_dim*4,base_dim,base_dim*4,self.activation,down=True),
)
self.layer_3 = nn.Sequential(
BottleNeck(base_dim*4,base_dim*2,base_dim*8,self.activation),
BottleNeck(base_dim*8,base_dim*2,base_dim*8,self.activation),
BottleNeck(base_dim*8,base_dim*2,base_dim*8,self.activation),
BottleNeck(base_dim*8,base_dim*2,base_dim*8,self.activation,down=True),
)
self.layer_4 = nn.Sequential(
BottleNeck(base_dim*8,base_dim*4,base_dim*16,self.activation),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.activation),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.activation),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.activation),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.activation),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.activation,down=True),
)
self.layer_5 = nn.Sequential(
BottleNeck(base_dim*16,base_dim*8,base_dim*32,self.activation),
BottleNeck(base_dim*32,base_dim*8,base_dim*32,self.activation),
BottleNeck(base_dim*32,base_dim*8,base_dim*32,self.activation),
)
self.avgpool = nn.AvgPool2d(1,1)
self.fc_layer = nn.Linear(base_dim*32,num_classes)
def forward(self, x):
out = self.layer_1(x)
out = self.layer_2(out)
out = self.layer_3(out)
out = self.layer_4(out)
out = self.layer_5(out)
out = self.avgpool(out)
out = out.view(batch_size,-1)
out = self.fc_layer(out)
return out
Train
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = ResNet(base_dim=64).to(device)
loss_func = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
for i in trange(num_epoch):
model.train() # 모델을 학습 모드로 설정
train_loss = 0.0
for j, [image, label] in enumerate(train_loader):
x = image.to(device)
y_ = label.to(device)
optimizer.zero_grad()
output = model(x)
loss = loss_func(output, y_)
loss.backward()
optimizer.step()
train_loss += loss.item()
train_loss /= len(train_loader)
if i % 10 == 0:
print(f"Epoch [{i}/{num_epoch}] Train Loss: {train_loss:.4f}")
torch.save(model.state_dict(), f'model_epoch_{i}.pth')
Train log
0%| | 0/100 [00:00<?, ?it/s]
Epoch [0/100] Train Loss: 2.0092
10%|█ | 10/100 [13:35<2:00:50, 80.56s/it]
Epoch [10/100] Train Loss: 0.6987
20%|██ | 20/100 [27:26<1:54:48, 86.10s/it]
Epoch [20/100] Train Loss: 0.2491
30%|███ | 30/100 [41:02<1:33:23, 80.05s/it]
Epoch [30/100] Train Loss: 0.2013
40%|████ | 40/100 [57:29<1:44:20, 104.35s/it]
Epoch [40/100] Train Loss: 0.1048
50%|█████ | 50/100 [1:13:20<1:15:53, 91.07s/it]
Epoch [50/100] Train Loss: 0.0849
60%|██████ | 60/100 [1:28:19<59:53, 89.83s/it]
Epoch [60/100] Train Loss: 0.0724
70%|███████ | 70/100 [1:42:47<43:55, 87.86s/it]
Epoch [70/100] Train Loss: 0.0653
80%|████████ | 80/100 [1:57:39<29:47, 89.39s/it]
Epoch [80/100] Train Loss: 0.0630
90%|█████████ | 90/100 [2:12:17<14:39, 87.94s/it]
Epoch [90/100] Train Loss: 0.0605
100%|██████████| 100/100 [2:27:01<00:00, 88.22s/it]
Result(code)
import matplotlib.pyplot as plt
# 모델을 평가 모드로 설정
model.eval()
# 테스트 데이터셋의 첫 번째 배치를 가져옴
images, labels = next(iter(test_loader))
images, labels = images.to(device), labels.to(device)
# 모델 예측
with torch.no_grad():
outputs = model(images)
# 예측 결과 처리
_, predicted = torch.max(outputs, 1)
# 이미지 출력 설정
fig, axs = plt.subplots(len(images), 1, figsize=(100, 100))
for i, img in enumerate(images.cpu()):
img = img.numpy().transpose((1, 2, 0))
axs[i].imshow(img)
axs[i].set_title(f'Label: {labels[i].item()}, Predict: {predicted[i].item()}', fontsize=10)
axs[i].axis('off')
plt.show()
Result(image)

참고¶
- Resnet - Google
- ChatGPT
- Blog