|
|
4 months ago | |
|---|---|---|
| dataset | 1 year ago | |
| images | 1 year ago | |
| README.md | 4 months ago | |
| inceptionnet.ipynb | 1 year ago | |
README.md
| layout | title | subtitle |
|---|---|---|
| default | 14. InceptionNet | Deep Learning |
InceptionNet
- 산업인공지능학과 대학원 2022254026 김홍열
InceptionNet이란?
이미지 인식 및 분류 작업을 위해 Google에서 개발된 딥러닝 아키텍처이다. InceptionNet의 여러 버전 중 가장 널리 알려진 것은 Inception v1 (GoogLeNet), Inception v2, Inception v3, Inception v4 등이 있다.
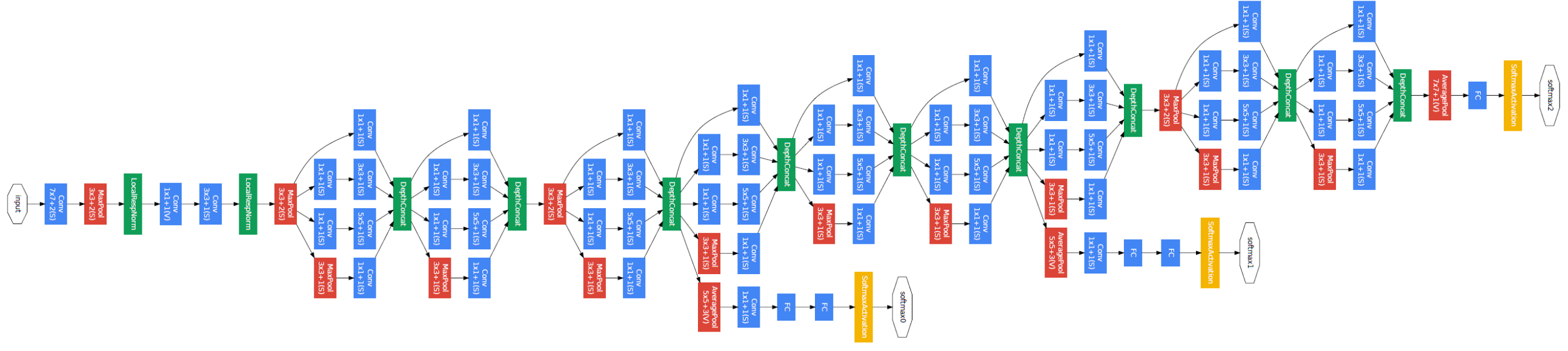
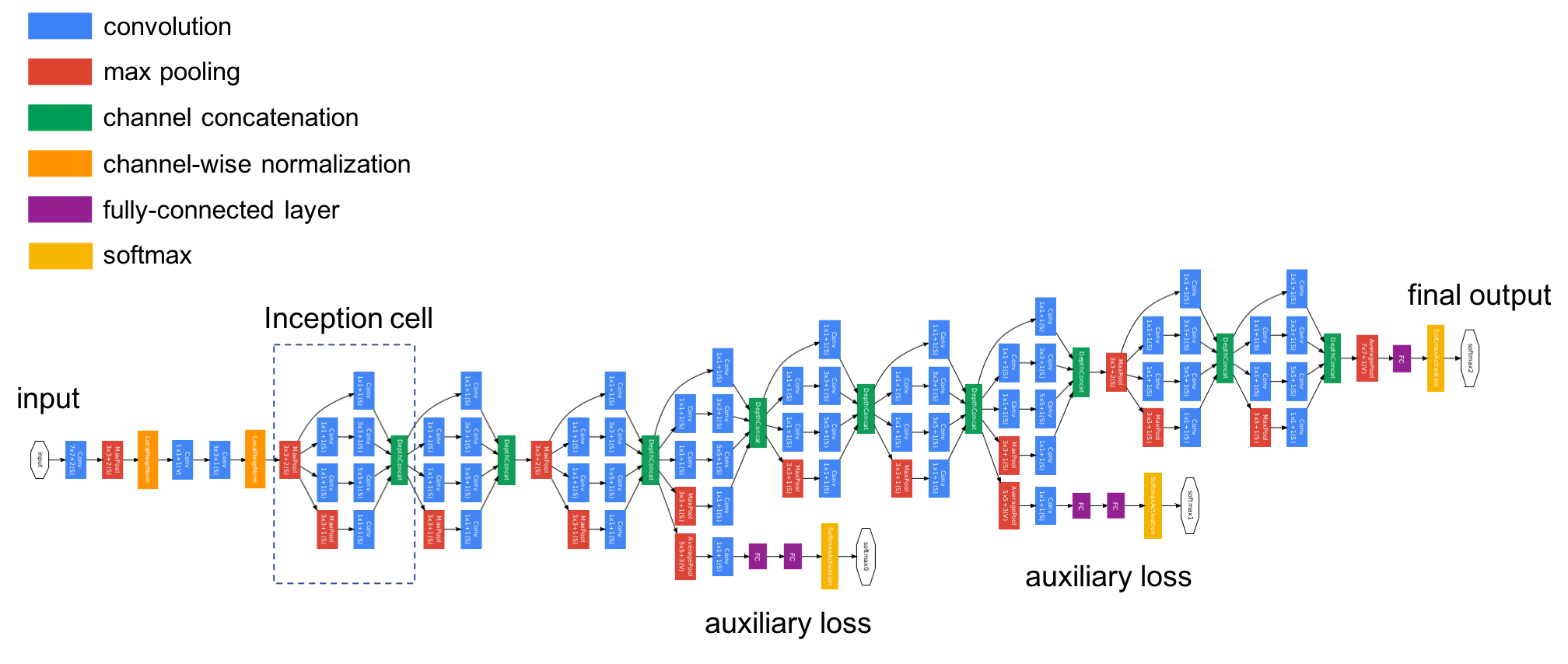
Inception v1 (GoogLeNet)
- 개발 배경
기존의 깊은 신경망이 컴퓨팅 자원 문제와 과적합 문제를 겪는 것에 대한 해결책으로 개발되었다.
- 특징
'Inception 모듈'이라고 불리는 빌딩 블록을 사용한다.
이 모듈은 서로 다른 크기의 컨볼루션 필터들(1x1, 3x3, 5x5)과 맥스 풀링을 병렬적으로 적용하고 결과를 결합한다.
이렇게 함으로써 다양한 스케일의 특징을 효과적으로 학습할 수 있다.
- 성과
2014년 ILSVRC (ImageNet Large Scale Visual Recognition Challenge)에서 우승했다.
- 추가 정보
GoogLeNet이라는 이름은 LeNet에서 영감을 받았으며, 22개 층으로 구성되어 있다.
Inception v2
- 개선 사항
Inception v1의 아이디어를 확장하여, 2D 컨볼루션 연산을 더 효율적으로 수행하는 방법이 제안되었다.
큰 컨볼루션 필터(예: 5x5)를 여러 개의 작은 필터(예: 3x3)로 분해하여 연산 효율성을 개선했다.
- 추가 정보
배치 정규화(Batch Normalization)를 도입하여 내부 공변량 이동(Internal Covariate Shift) 문제를 해결하고 학습 속도를 개선했다.
Inception v3
- 개선 사항
더욱 정교한 Inception 모듈을 사용하고, 학습 과정을 안정화하는 방법을 도입했다.
5x5 컨볼루션을 두 개의 3x3 컨볼루션으로 대체하고, RMSProp 옵티마이저, 라벨 스무딩, 배치 정규화 등을 사용하여 성능을 향상시켰다.
- 추가 정보
비대칭 컨볼루션(예: nx1 followed by 1xn)을 도입하여 파라미터 수를 줄이고 계산 효율성을 높였다.
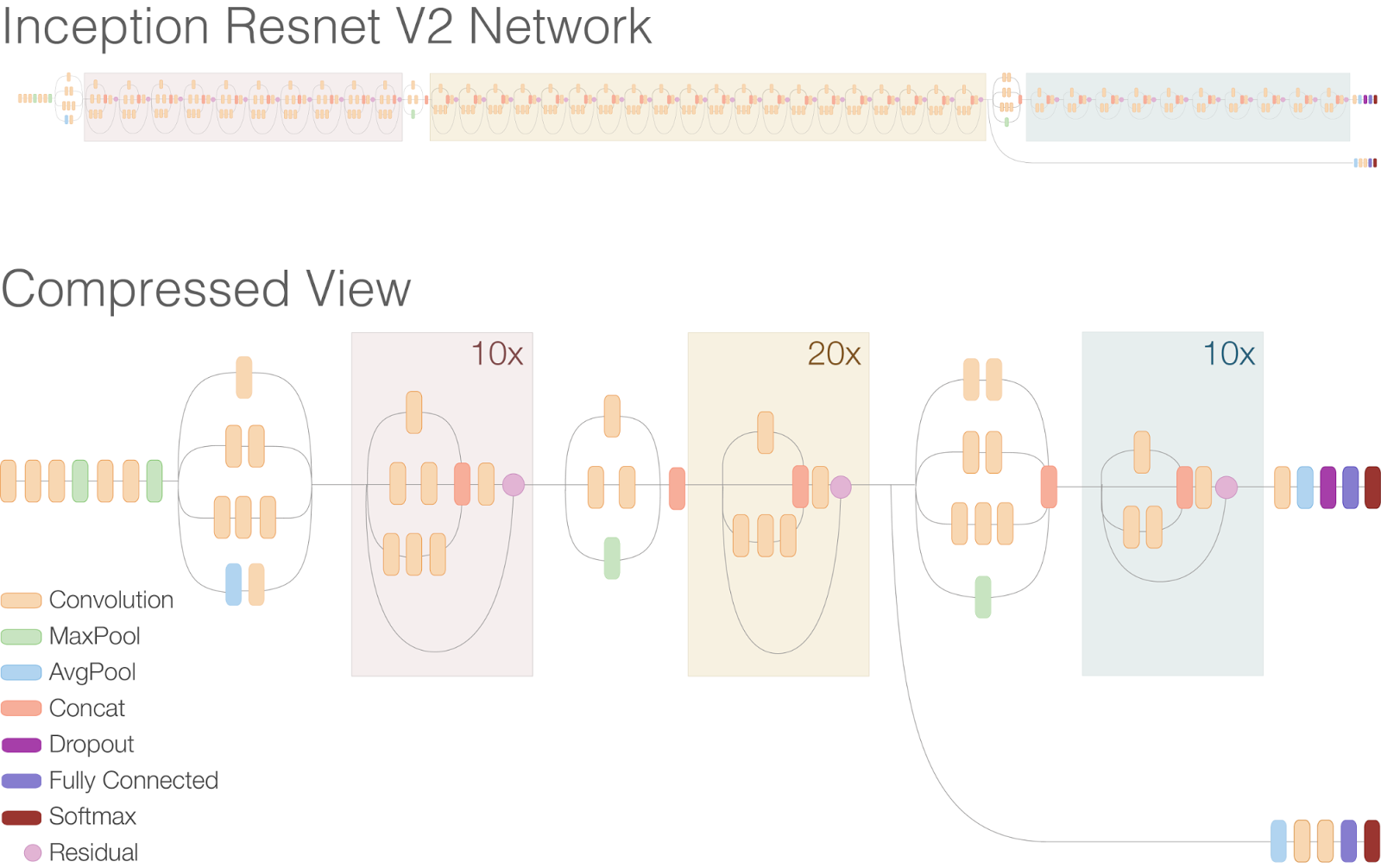
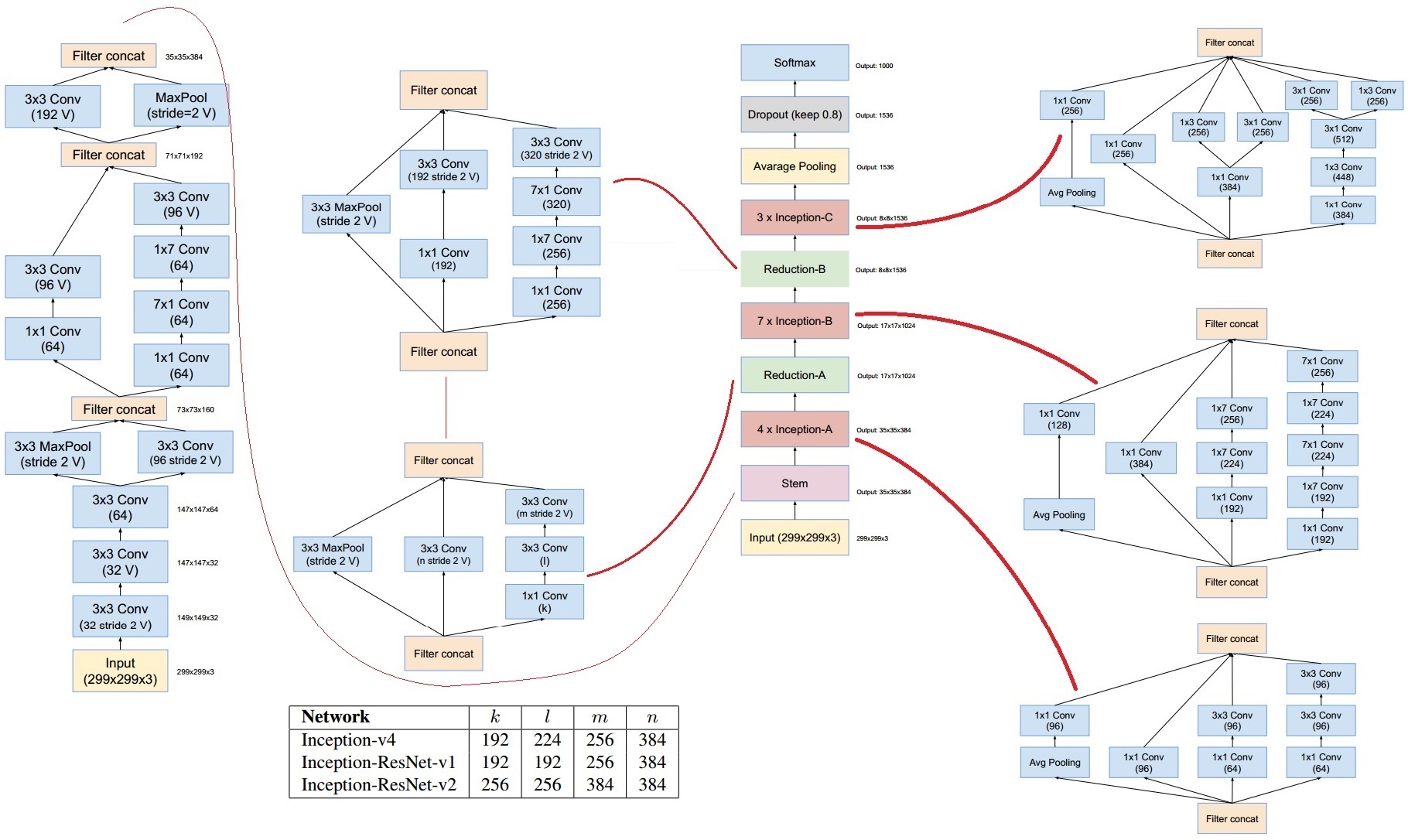
Inception v4
- 개발 배경
Inception 아키텍처와 ResNet 아키텍처의 아이디어를 결합했다.
- 특징
Inception-ResNet이라고도 불리며, Inception 모듈에 잔차 연결(Residual Connections)을 추가하여 네트워크를 더 깊게 만들면서도 학습을 안정화하였다.
- 추가 정보
Inception-ResNet-v2는 Inception v4와 함께 소개되었으며, 더 적은 파라미터로 유사하거나 더 나은 성능을 보여주었다.
InceptionNet은 다양한 크기의 컨볼루션 필터와 풀링 레이어를 병렬로 적용함으로써 이미지의 다양한 특징을 효과적으로 추출할 수 있으며, 네트워크가 깊어짐에 따라 발생할 수 있는 과적합 문제와 학습의 어려움을 극복하기 위한 여러 기술을 적용한다.
결론적으로, InceptionNet 시리즈는 컴퓨터 비전 분야에서 중요한 발전을 이루었으며, 효율적인 네트워크 설계와 성능 향상을 위한 다양한 기법을 소개했다.
예제 코드¶
Import
# import package
# model
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchsummary import summary
from torch import optim
# dataset and transformation
from torchvision import datasets
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import os
# display images
from torchvision import utils
import matplotlib.pyplot as plt
%matplotlib inline
# utils
import numpy as np
from torchsummary import summary
import time
import copy
데이터셋(STL10)
데이터셋은 torchvision 패키지에서 제공하는 STL10 dataset을 사용한다.
STL10 dataset은 10개의 label을 갖으며 train dataset 5000개, test dataset 8000개로 구성된다.
예제 코드¶
STL10 dataset
# specift the data path
path2data = './dataset'
# if not exists the path, make the directory
if not os.path.exists(path2data):
os.mkdir(path2data)
# load dataset
train_ds = datasets.STL10(path2data, split='train', download=True, transform=transforms.ToTensor())
val_ds = datasets.STL10(path2data, split='test', download=True, transform=transforms.ToTensor())
print(len(train_ds))
print(len(val_ds))
DataLoader & TransFormation
# define image transformation
transformation = transforms.Compose([
transforms.ToTensor(),
transforms.Resize(299)
])
train_ds.transform = transformation
val_ds.transform = transformation
# create dataloader
train_dl = DataLoader(train_ds, batch_size=8, shuffle=True)
val_dl = DataLoader(val_ds, batch_size=8, shuffle=True)
Test
# display sample images
def show(img, y=None, color=True):
npimg = img.numpy()
npimg_tr = np.transpose(npimg, (1, 2, 0))
plt.imshow(npimg_tr)
if y is not None:
plt.title('labels:' + str(y))
np.random.seed(0)
torch.manual_seed(0)
grid_size = 4
rnd_ind = np.random.randint(0, len(train_ds), grid_size)
x_grid = [train_ds[i][0] for i in rnd_ind]
y_grid = [train_ds[i][1] for i in rnd_ind]
plt.figure(figsize=(10,10))
x_grid = utils.make_grid(x_grid, nrow=4, padding=2)
show(x_grid, y_grid)
Model Network (Inception-ResNet-v2)
Inception-ResNet-v2는 Inception-v4에 residual block을 사용하는 모델이다.
예제 코드¶
Model Network
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, **kwargs):
super().__init__()
# bias=Fasle, because BN after conv includes bias.
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, bias=False, **kwargs),
nn.BatchNorm2d(out_channels),
nn.ReLU()
)
def forward(self, x):
x = self.conv(x)
return x
class Stem(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Sequential(
BasicConv2d(3, 32, 3, stride=2, padding=0), # 149 x 149 x 32
BasicConv2d(32, 32, 3, stride=1, padding=0), # 147 x 147 x 32
BasicConv2d(32, 64, 3, stride=1, padding=1), # 147 x 147 x 64
)
self.branch3x3_conv = BasicConv2d(64, 96, 3, stride=2, padding=0) # 73x73x96
# kernel_size=4: 피쳐맵 크기 73, kernel_size=3: 피쳐맵 크기 74
self.branch3x3_pool = nn.MaxPool2d(4, stride=2, padding=1) # 73x73x64
self.branch7x7a = nn.Sequential(
BasicConv2d(160, 64, 1, stride=1, padding=0),
BasicConv2d(64, 96, 3, stride=1, padding=0)
) # 71x71x96
self.branch7x7b = nn.Sequential(
BasicConv2d(160, 64, 1, stride=1, padding=0),
BasicConv2d(64, 64, (7,1), stride=1, padding=(3,0)),
BasicConv2d(64, 64, (1,7), stride=1, padding=(0,3)),
BasicConv2d(64, 96, 3, stride=1, padding=0)
) # 71x71x96
self.branchpoola = BasicConv2d(192, 192, 3, stride=2, padding=0) # 35x35x192
# kernel_size=4: 피쳐맵 크기 73, kernel_size=3: 피쳐맵 크기 74
self.branchpoolb = nn.MaxPool2d(4, 2, 1) # 35x35x192
def forward(self, x):
x = self.conv1(x)
x = torch.cat((self.branch3x3_conv(x), self.branch3x3_pool(x)), dim=1)
x = torch.cat((self.branch7x7a(x), self.branch7x7b(x)), dim=1)
x = torch.cat((self.branchpoola(x), self.branchpoolb(x)), dim=1)
return x
class Inception_Resnet_A(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branch1x1 = BasicConv2d(in_channels, 32, 1, stride=1, padding=0)
self.branch3x3 = nn.Sequential(
BasicConv2d(in_channels, 32, 1, stride=1, padding=0),
BasicConv2d(32, 32, 3, stride=1, padding=1)
)
self.branch3x3stack = nn.Sequential(
BasicConv2d(in_channels, 32, 1, stride=1, padding=0),
BasicConv2d(32, 48, 3, stride=1, padding=1),
BasicConv2d(48, 64, 3, stride=1, padding=1)
)
self.reduction1x1 = nn.Conv2d(128, 384, 1, stride=1, padding=0)
self.shortcut = nn.Conv2d(in_channels, 384, 1, stride=1, padding=0)
self.bn = nn.BatchNorm2d(384)
self.relu = nn.ReLU()
def forward(self, x):
x_shortcut = self.shortcut(x)
x = torch.cat((self.branch1x1(x), self.branch3x3(x), self.branch3x3stack(x)), dim=1)
x = self.reduction1x1(x)
x = self.bn(x_shortcut + x)
x = self.relu(x)
return x
class Inception_Resnet_B(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branch1x1 = BasicConv2d(in_channels, 192, 1, stride=1, padding=0)
self.branch7x7 = nn.Sequential(
BasicConv2d(in_channels, 128, 1, stride=1, padding=0),
BasicConv2d(128, 160, (1,7), stride=1, padding=(0,3)),
BasicConv2d(160, 192, (7,1), stride=1, padding=(3,0))
)
self.reduction1x1 = nn.Conv2d(384, 1152, 1, stride=1, padding=0)
self.shortcut = nn.Conv2d(in_channels, 1152, 1, stride=1, padding=0)
self.bn = nn.BatchNorm2d(1152)
self.relu = nn.ReLU()
def forward(self, x):
x_shortcut = self.shortcut(x)
x = torch.cat((self.branch1x1(x), self.branch7x7(x)), dim=1)
x = self.reduction1x1(x) * 0.1
x = self.bn(x + x_shortcut)
x = self.relu(x)
return x
class Inception_Resnet_C(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branch1x1 = BasicConv2d(in_channels, 192, 1, stride=1, padding=0)
self.branch3x3 = nn.Sequential(
BasicConv2d(in_channels, 192, 1, stride=1, padding=0),
BasicConv2d(192, 224, (1,3), stride=1, padding=(0,1)),
BasicConv2d(224, 256, (3,1), stride=1, padding=(1,0))
)
self.reduction1x1 = nn.Conv2d(448, 2144, 1, stride=1, padding=0)
self.shortcut = nn.Conv2d(in_channels, 2144, 1, stride=1, padding=0) # 2144
self.bn = nn.BatchNorm2d(2144)
self.relu = nn.ReLU()
def forward(self, x):
x_shortcut = self.shortcut(x)
x = torch.cat((self.branch1x1(x), self.branch3x3(x)), dim=1)
x = self.reduction1x1(x) * 0.1
x = self.bn(x_shortcut + x)
x = self.relu(x)
return x
class ReductionA(nn.Module):
def __init__(self, in_channels, k, l, m, n):
super().__init__()
self.branchpool = nn.MaxPool2d(3, 2)
self.branch3x3 = BasicConv2d(in_channels, n, 3, stride=2, padding=0)
self.branch3x3stack = nn.Sequential(
BasicConv2d(in_channels, k, 1, stride=1, padding=0),
BasicConv2d(k, l, 3, stride=1, padding=1),
BasicConv2d(l, m, 3, stride=2, padding=0)
)
self.output_channels = in_channels + n + m
def forward(self, x):
x = torch.cat((self.branchpool(x), self.branch3x3(x), self.branch3x3stack(x)), dim=1)
return x
class ReductionB(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branchpool = nn.MaxPool2d(3, 2)
self.branch3x3a = nn.Sequential(
BasicConv2d(in_channels, 256, 1, stride=1, padding=0),
BasicConv2d(256, 384, 3, stride=2, padding=0)
)
self.branch3x3b = nn.Sequential(
BasicConv2d(in_channels, 256, 1, stride=1, padding=0),
BasicConv2d(256, 288, 3, stride=2, padding=0)
)
self.branch3x3stack = nn.Sequential(
BasicConv2d(in_channels, 256, 1, stride=1, padding=0),
BasicConv2d(256, 288, 3, stride=1, padding=1),
BasicConv2d(288, 320, 3, stride=2, padding=0)
)
def forward(self, x):
x = torch.cat((self.branchpool(x), self.branch3x3a(x), self.branch3x3b(x), self.branch3x3stack(x)), dim=1)
return x
class InceptionResNetV2(nn.Module):
def __init__(self, A, B, C, k=256, l=256, m=384, n=384, num_classes=10, init_weights=True):
super().__init__()
blocks = []
blocks.append(Stem())
for i in range(A):
blocks.append(Inception_Resnet_A(384))
blocks.append(ReductionA(384, k, l, m, n))
for i in range(B):
blocks.append(Inception_Resnet_B(1152))
blocks.append(ReductionB(1152))
for i in range(C):
blocks.append(Inception_Resnet_C(2144))
self.features = nn.Sequential(*blocks)
self.avgpool = nn.AdaptiveAvgPool2d((1,1))
# drop out
self.dropout = nn.Dropout2d(0.2)
self.linear = nn.Linear(2144, num_classes)
# weights inittialization
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.dropout(x)
x = self.linear(x)
return x
# define weight initialization function
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
Check
# check Stem
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.randn((3, 3, 299, 299)).to(device)
model = Stem().to(device)
output_Stem = model(x)
print('Input size:', x.size())
print('Stem output size:', output_Stem.size())
# check Inception_Resnet_A
model = Inception_Resnet_A(output_Stem.size()[1]).to(device)
output_resA = model(output_Stem)
print('Input size:', output_Stem.size())
print('output size:', output_resA.size())
# check ReductionA
print('input size:', output_resA.size())
model = ReductionA(output_resA.size()[1], 256, 256, 384, 384).to(device)
output_rA = model(output_resA)
print('output size:', output_rA.size())
# check Inception_Resnet_B
model = Inception_Resnet_B(output_rA.size()[1]).to(device)
output_resB = model(output_rA)
print('Input size:', output_rA.size())
print('output size:', output_resB.size())
# check ReductionB
model = ReductionB(output_resB.size()[1]).to(device)
output_rB = model(output_resB)
print('Input size:', output_resB.size())
print('output size:', output_rB.size())
# check Inception_Resnet_C
model = Inception_Resnet_C(output_rB.size()[1]).to(device)
output_resC = model(output_rB)
print('Input size:', output_rB.size())
print('output size:', output_resC.size())
Create Model
# create InceptionResNetV2
model = InceptionResNetV2(10, 20, 10).to(device)
summary(model, (3, 299, 299), device=device.type)
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 32, 149, 149] 864
BatchNorm2d-2 [-1, 32, 149, 149] 64
ReLU-3 [-1, 32, 149, 149] 0
BasicConv2d-4 [-1, 32, 149, 149] 0
Conv2d-5 [-1, 32, 147, 147] 9,216
BatchNorm2d-6 [-1, 32, 147, 147] 64
ReLU-7 [-1, 32, 147, 147] 0
BasicConv2d-8 [-1, 32, 147, 147] 0
Conv2d-9 [-1, 64, 147, 147] 18,432
BatchNorm2d-10 [-1, 64, 147, 147] 128
ReLU-11 [-1, 64, 147, 147] 0
BasicConv2d-12 [-1, 64, 147, 147] 0
Conv2d-13 [-1, 96, 73, 73] 55,296
BatchNorm2d-14 [-1, 96, 73, 73] 192
ReLU-15 [-1, 96, 73, 73] 0
BasicConv2d-16 [-1, 96, 73, 73] 0
MaxPool2d-17 [-1, 64, 73, 73] 0
Conv2d-18 [-1, 64, 73, 73] 10,240
BatchNorm2d-19 [-1, 64, 73, 73] 128
ReLU-20 [-1, 64, 73, 73] 0
BasicConv2d-21 [-1, 64, 73, 73] 0
Conv2d-22 [-1, 96, 71, 71] 55,296
...
Forward/backward pass size (MB): 940.05
Params size (MB): 485.57
Estimated Total Size (MB): 1426.65
Train
Train Function
# define loss function and optimizer
loss_func = nn.CrossEntropyLoss(reduction='sum')
opt = optim.Adam(model.parameters(), lr=0.001)
from torch.optim.lr_scheduler import ReduceLROnPlateau
lr_scheduler = ReduceLROnPlateau(opt, mode='min', factor=0.1, patience=10)
# function to get current learning rate
def get_lr(opt):
for param_group in opt.param_groups:
return param_group['lr']
# function to calculate metric per mini-batch
def metric_batch(output, target):
pred = output.argmax(1, keepdim=True)
corrects = pred.eq(target.view_as(pred)).sum().item()
return corrects
# function to calculate loss per mini-batch
def loss_batch(loss_func, output, target, opt=None):
loss_b = loss_func(output, target)
metric_b = metric_batch(output, target)
if opt is not None:
opt.zero_grad()
loss_b.backward()
opt.step()
return loss_b.item(), metric_b
# function to calculate loss per epoch
def loss_epoch(model, loss_func, dataset_dl, sanity_check=False, opt=None):
running_loss = 0.0
running_metric = 0.0
len_data = len(dataset_dl.dataset)
for xb, yb in dataset_dl:
xb = xb.to(device)
yb = yb.to(device)
output = model(xb)
loss_b, metric_b = loss_batch(loss_func, output, yb, opt)
running_loss += loss_b
if metric_b is not None:
running_metric += metric_b
if sanity_check is True:
break
loss = running_loss / len_data
metric = running_metric / len_data
return loss, metric
# function to start training
def train_val(model, params):
num_epochs=params['num_epochs']
loss_func=params["loss_func"]
opt=params["optimizer"]
train_dl=params["train_dl"]
val_dl=params["val_dl"]
sanity_check=params["sanity_check"]
lr_scheduler=params["lr_scheduler"]
path2weights=params["path2weights"]
loss_history = {'train': [], 'val': []}
metric_history = {'train': [], 'val': []}
best_loss = float('inf')
start_time = time.time()
for epoch in range(num_epochs):
current_lr = get_lr(opt)
print('Epoch {}/{}, current lr={}'.format(epoch, num_epochs-1, current_lr))
model.train()
train_loss, train_metric = loss_epoch(model, loss_func, train_dl, sanity_check, opt)
loss_history['train'].append(train_loss)
metric_history['train'].append(train_metric)
model.eval()
with torch.no_grad():
val_loss, val_metric = loss_epoch(model, loss_func, val_dl, sanity_check)
loss_history['val'].append(val_loss)
metric_history['val'].append(val_metric)
if val_loss < best_loss:
best_loss = val_loss
print('Get best val_loss!')
lr_scheduler.step(val_loss)
print('train loss: %.6f, val loss: %.6f, accuracy: %.2f, time: %.4f min' %(train_loss, val_loss, 100*val_metric, (time.time()-start_time)/60))
print('-'*10)
return model, loss_history, metric_history
Hyper Parameters
# definc the training parameters
params_train = {
'num_epochs':5,
'optimizer':opt,
'loss_func':loss_func,
'train_dl':train_dl,
'val_dl':val_dl,
'sanity_check':False,
'lr_scheduler':lr_scheduler,
'path2weights':'./models/weights.pt',
}
# create the directory that stores weights.pt
def createFolder(directory):
try:
if not os.path.exists(directory):
os.makedirs(directory)
except OSerror:
print('Error')
createFolder('./models')
Train
model, loss_hist, metric_hist = train_val(model, params_train)
Epoch 0/4, current lr=0.001
Get best val_loss!
train loss: 2.306605, val loss: 2.231432, accuracy: 15.30, time: 5.8292 min
----------
Epoch 1/4, current lr=0.001
train loss: 2.189562, val loss: 2.556953, accuracy: 13.54, time: 11.6434 min
----------
Epoch 2/4, current lr=0.001
train loss: 2.219446, val loss: 3.126347, accuracy: 12.56, time: 17.9946 min
----------
Epoch 3/4, current lr=0.001
train loss: 2.309346, val loss: 2.388916, accuracy: 10.78, time: 23.9601 min
----------
Epoch 4/4, current lr=0.001
train loss: 2.317668, val loss: 2.364337, accuracy: 10.96, time: 29.7933 min
----------
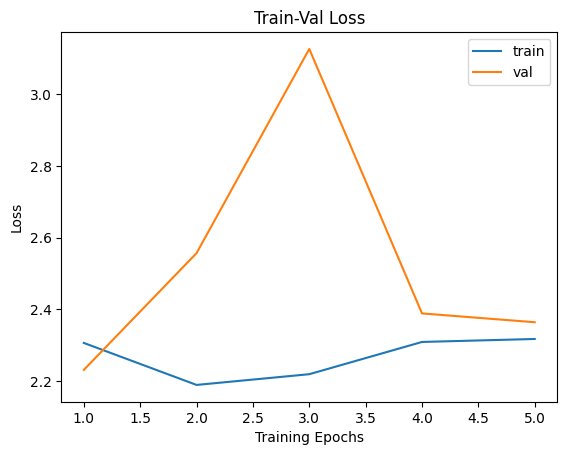
Result
Loss & Accuracy Graph
# Train-Validation Progress
num_epochs=params_train["num_epochs"]
# plot loss progress
plt.title("Train-Val Loss")
plt.plot(range(1,num_epochs+1),loss_hist["train"],label="train")
plt.plot(range(1,num_epochs+1),loss_hist["val"],label="val")
plt.ylabel("Loss")
plt.xlabel("Training Epochs")
plt.legend()
plt.show()
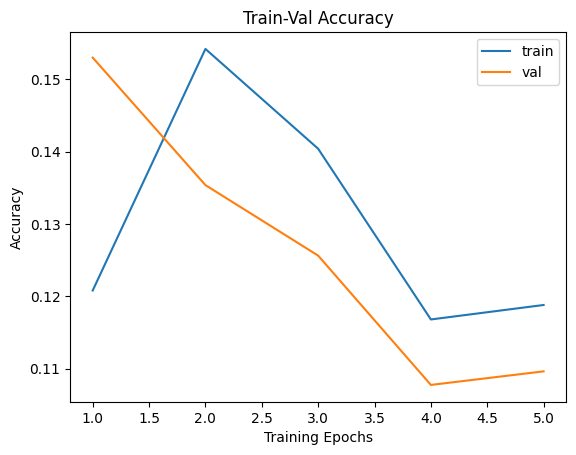
# plot accuracy progress
plt.title("Train-Val Accuracy")
plt.plot(range(1,num_epochs+1),metric_hist["train"],label="train")
plt.plot(range(1,num_epochs+1),metric_hist["val"],label="val")
plt.ylabel("Accuracy")
plt.xlabel("Training Epochs")
plt.legend()
plt.show()
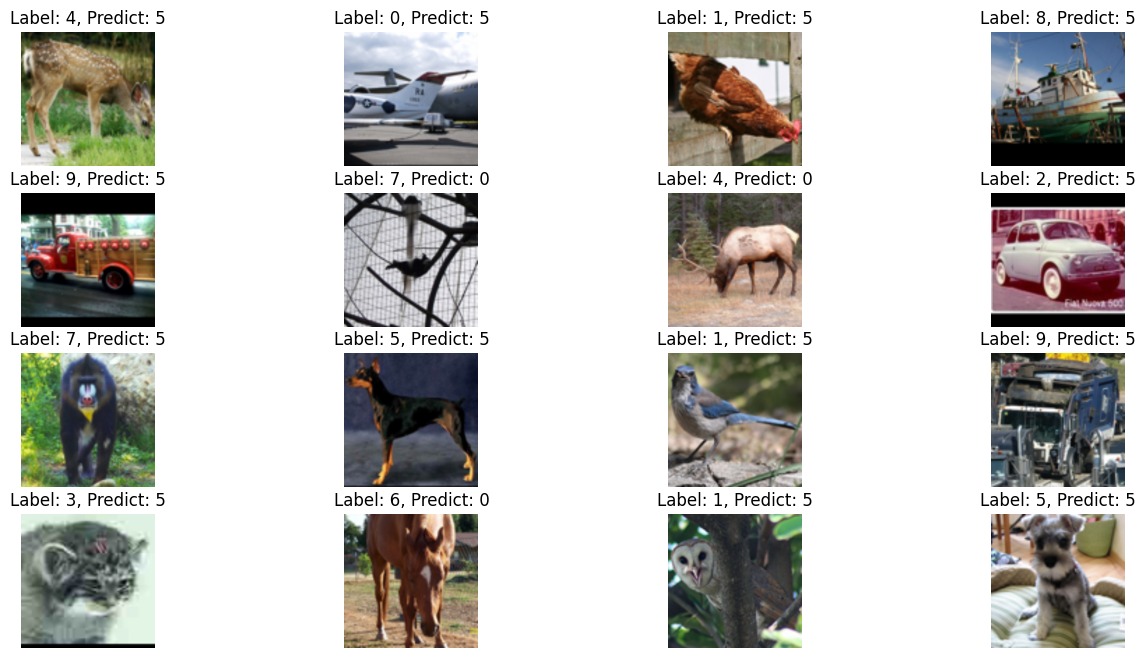
Visualize
import matplotlib.pyplot as plt
import numpy as np
model.eval()
result_images = []
result_preds = []
result_labels = []
with torch.no_grad():
for i, (images, labels) in enumerate(val_dl):
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, preds = torch.max(outputs, 1)
result_images.extend(images.cpu().numpy())
result_preds.extend(preds.cpu().numpy())
result_labels.extend(labels.cpu().numpy())
if i == 2: # 3번째 배치까지만 시각화
break
# 결과 시각화
plt.figure(figsize=(16, 8))
for i in range(16):
plt.subplot(4, 4, i+1)
img = result_images[i].transpose((1, 2, 0))
img = (img - img.min()) / (img.max() - img.min())
plt.imshow(img)
plt.title(f'Label: {result_labels[i]}, Predict: {result_preds[i]}')
plt.axis('off')
plt.show()
참고¶
- GAN - Google
- ChatGPT
- GitHub