You cannot select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
21 KiB
21 KiB
| layout | title | subtitle |
|---|---|---|
| default | 14. InceptionNet | Deep Learning |
InceptionNet
- 산업인공지능학과 대학원 2022254026 김홍열
예제 코드¶
Import
# import package
# model
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchsummary import summary
from torch import optim
# dataset and transformation
from torchvision import datasets
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import os
# display images
from torchvision import utils
import matplotlib.pyplot as plt
%matplotlib inline
# utils
import numpy as np
from torchsummary import summary
import time
import copy
데이터셋(STL10)
데이터셋은 torchvision 패키지에서 제공하는 STL10 dataset을 사용한다.
STL10 dataset은 10개의 label을 갖으며 train dataset 5000개, test dataset 8000개로 구성된다.
예제 코드¶
STL10 dataset
# specift the data path
path2data = './dataset'
# if not exists the path, make the directory
if not os.path.exists(path2data):
os.mkdir(path2data)
# load dataset
train_ds = datasets.STL10(path2data, split='train', download=True, transform=transforms.ToTensor())
val_ds = datasets.STL10(path2data, split='test', download=True, transform=transforms.ToTensor())
print(len(train_ds))
print(len(val_ds))

DataLoader & TransFormation
# define image transformation
transformation = transforms.Compose([
transforms.ToTensor(),
transforms.Resize(299)
])
train_ds.transform = transformation
val_ds.transform = transformation
# create dataloader
train_dl = DataLoader(train_ds, batch_size=8, shuffle=True)
val_dl = DataLoader(val_ds, batch_size=8, shuffle=True)
Test
# display sample images
def show(img, y=None, color=True):
npimg = img.numpy()
npimg_tr = np.transpose(npimg, (1, 2, 0))
plt.imshow(npimg_tr)
if y is not None:
plt.title('labels:' + str(y))
np.random.seed(0)
torch.manual_seed(0)
grid_size = 4
rnd_ind = np.random.randint(0, len(train_ds), grid_size)
x_grid = [train_ds[i][0] for i in rnd_ind]
y_grid = [train_ds[i][1] for i in rnd_ind]
plt.figure(figsize=(10,10))
x_grid = utils.make_grid(x_grid, nrow=4, padding=2)
show(x_grid, y_grid)
Model Network (Inception-ResNet-v2)
Inception-ResNet-v2는 Inception-v4에 residual block을 사용하는 모델이다.
예제 코드¶
Model Network
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, **kwargs):
super().__init__()
# bias=Fasle, because BN after conv includes bias.
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, bias=False, **kwargs),
nn.BatchNorm2d(out_channels),
nn.ReLU()
)
def forward(self, x):
x = self.conv(x)
return x
class Stem(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Sequential(
BasicConv2d(3, 32, 3, stride=2, padding=0), # 149 x 149 x 32
BasicConv2d(32, 32, 3, stride=1, padding=0), # 147 x 147 x 32
BasicConv2d(32, 64, 3, stride=1, padding=1), # 147 x 147 x 64
)
self.branch3x3_conv = BasicConv2d(64, 96, 3, stride=2, padding=0) # 73x73x96
# kernel_size=4: 피쳐맵 크기 73, kernel_size=3: 피쳐맵 크기 74
self.branch3x3_pool = nn.MaxPool2d(4, stride=2, padding=1) # 73x73x64
self.branch7x7a = nn.Sequential(
BasicConv2d(160, 64, 1, stride=1, padding=0),
BasicConv2d(64, 96, 3, stride=1, padding=0)
) # 71x71x96
self.branch7x7b = nn.Sequential(
BasicConv2d(160, 64, 1, stride=1, padding=0),
BasicConv2d(64, 64, (7,1), stride=1, padding=(3,0)),
BasicConv2d(64, 64, (1,7), stride=1, padding=(0,3)),
BasicConv2d(64, 96, 3, stride=1, padding=0)
) # 71x71x96
self.branchpoola = BasicConv2d(192, 192, 3, stride=2, padding=0) # 35x35x192
# kernel_size=4: 피쳐맵 크기 73, kernel_size=3: 피쳐맵 크기 74
self.branchpoolb = nn.MaxPool2d(4, 2, 1) # 35x35x192
def forward(self, x):
x = self.conv1(x)
x = torch.cat((self.branch3x3_conv(x), self.branch3x3_pool(x)), dim=1)
x = torch.cat((self.branch7x7a(x), self.branch7x7b(x)), dim=1)
x = torch.cat((self.branchpoola(x), self.branchpoolb(x)), dim=1)
return x
class Inception_Resnet_A(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branch1x1 = BasicConv2d(in_channels, 32, 1, stride=1, padding=0)
self.branch3x3 = nn.Sequential(
BasicConv2d(in_channels, 32, 1, stride=1, padding=0),
BasicConv2d(32, 32, 3, stride=1, padding=1)
)
self.branch3x3stack = nn.Sequential(
BasicConv2d(in_channels, 32, 1, stride=1, padding=0),
BasicConv2d(32, 48, 3, stride=1, padding=1),
BasicConv2d(48, 64, 3, stride=1, padding=1)
)
self.reduction1x1 = nn.Conv2d(128, 384, 1, stride=1, padding=0)
self.shortcut = nn.Conv2d(in_channels, 384, 1, stride=1, padding=0)
self.bn = nn.BatchNorm2d(384)
self.relu = nn.ReLU()
def forward(self, x):
x_shortcut = self.shortcut(x)
x = torch.cat((self.branch1x1(x), self.branch3x3(x), self.branch3x3stack(x)), dim=1)
x = self.reduction1x1(x)
x = self.bn(x_shortcut + x)
x = self.relu(x)
return x
class Inception_Resnet_B(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branch1x1 = BasicConv2d(in_channels, 192, 1, stride=1, padding=0)
self.branch7x7 = nn.Sequential(
BasicConv2d(in_channels, 128, 1, stride=1, padding=0),
BasicConv2d(128, 160, (1,7), stride=1, padding=(0,3)),
BasicConv2d(160, 192, (7,1), stride=1, padding=(3,0))
)
self.reduction1x1 = nn.Conv2d(384, 1152, 1, stride=1, padding=0)
self.shortcut = nn.Conv2d(in_channels, 1152, 1, stride=1, padding=0)
self.bn = nn.BatchNorm2d(1152)
self.relu = nn.ReLU()
def forward(self, x):
x_shortcut = self.shortcut(x)
x = torch.cat((self.branch1x1(x), self.branch7x7(x)), dim=1)
x = self.reduction1x1(x) * 0.1
x = self.bn(x + x_shortcut)
x = self.relu(x)
return x
class Inception_Resnet_C(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branch1x1 = BasicConv2d(in_channels, 192, 1, stride=1, padding=0)
self.branch3x3 = nn.Sequential(
BasicConv2d(in_channels, 192, 1, stride=1, padding=0),
BasicConv2d(192, 224, (1,3), stride=1, padding=(0,1)),
BasicConv2d(224, 256, (3,1), stride=1, padding=(1,0))
)
self.reduction1x1 = nn.Conv2d(448, 2144, 1, stride=1, padding=0)
self.shortcut = nn.Conv2d(in_channels, 2144, 1, stride=1, padding=0) # 2144
self.bn = nn.BatchNorm2d(2144)
self.relu = nn.ReLU()
def forward(self, x):
x_shortcut = self.shortcut(x)
x = torch.cat((self.branch1x1(x), self.branch3x3(x)), dim=1)
x = self.reduction1x1(x) * 0.1
x = self.bn(x_shortcut + x)
x = self.relu(x)
return x
class ReductionA(nn.Module):
def __init__(self, in_channels, k, l, m, n):
super().__init__()
self.branchpool = nn.MaxPool2d(3, 2)
self.branch3x3 = BasicConv2d(in_channels, n, 3, stride=2, padding=0)
self.branch3x3stack = nn.Sequential(
BasicConv2d(in_channels, k, 1, stride=1, padding=0),
BasicConv2d(k, l, 3, stride=1, padding=1),
BasicConv2d(l, m, 3, stride=2, padding=0)
)
self.output_channels = in_channels + n + m
def forward(self, x):
x = torch.cat((self.branchpool(x), self.branch3x3(x), self.branch3x3stack(x)), dim=1)
return x
class ReductionB(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.branchpool = nn.MaxPool2d(3, 2)
self.branch3x3a = nn.Sequential(
BasicConv2d(in_channels, 256, 1, stride=1, padding=0),
BasicConv2d(256, 384, 3, stride=2, padding=0)
)
self.branch3x3b = nn.Sequential(
BasicConv2d(in_channels, 256, 1, stride=1, padding=0),
BasicConv2d(256, 288, 3, stride=2, padding=0)
)
self.branch3x3stack = nn.Sequential(
BasicConv2d(in_channels, 256, 1, stride=1, padding=0),
BasicConv2d(256, 288, 3, stride=1, padding=1),
BasicConv2d(288, 320, 3, stride=2, padding=0)
)
def forward(self, x):
x = torch.cat((self.branchpool(x), self.branch3x3a(x), self.branch3x3b(x), self.branch3x3stack(x)), dim=1)
return x
class InceptionResNetV2(nn.Module):
def __init__(self, A, B, C, k=256, l=256, m=384, n=384, num_classes=10, init_weights=True):
super().__init__()
blocks = []
blocks.append(Stem())
for i in range(A):
blocks.append(Inception_Resnet_A(384))
blocks.append(ReductionA(384, k, l, m, n))
for i in range(B):
blocks.append(Inception_Resnet_B(1152))
blocks.append(ReductionB(1152))
for i in range(C):
blocks.append(Inception_Resnet_C(2144))
self.features = nn.Sequential(*blocks)
self.avgpool = nn.AdaptiveAvgPool2d((1,1))
# drop out
self.dropout = nn.Dropout2d(0.2)
self.linear = nn.Linear(2144, num_classes)
# weights inittialization
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.dropout(x)
x = self.linear(x)
return x
# define weight initialization function
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
Check
# check Stem
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.randn((3, 3, 299, 299)).to(device)
model = Stem().to(device)
output_Stem = model(x)
print('Input size:', x.size())
print('Stem output size:', output_Stem.size())
# check Inception_Resnet_A
model = Inception_Resnet_A(output_Stem.size()[1]).to(device)
output_resA = model(output_Stem)
print('Input size:', output_Stem.size())
print('output size:', output_resA.size())
# check ReductionA
print('input size:', output_resA.size())
model = ReductionA(output_resA.size()[1], 256, 256, 384, 384).to(device)
output_rA = model(output_resA)
print('output size:', output_rA.size())
# check Inception_Resnet_B
model = Inception_Resnet_B(output_rA.size()[1]).to(device)
output_resB = model(output_rA)
print('Input size:', output_rA.size())
print('output size:', output_resB.size())
# check ReductionB
model = ReductionB(output_resB.size()[1]).to(device)
output_rB = model(output_resB)
print('Input size:', output_resB.size())
print('output size:', output_rB.size())
# check Inception_Resnet_C
model = Inception_Resnet_C(output_rB.size()[1]).to(device)
output_resC = model(output_rB)
print('Input size:', output_rB.size())
print('output size:', output_resC.size())
Create Model
# create InceptionResNetV2
model = InceptionResNetV2(10, 20, 10).to(device)
summary(model, (3, 299, 299), device=device.type)
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 32, 149, 149] 864
BatchNorm2d-2 [-1, 32, 149, 149] 64
ReLU-3 [-1, 32, 149, 149] 0
BasicConv2d-4 [-1, 32, 149, 149] 0
Conv2d-5 [-1, 32, 147, 147] 9,216
BatchNorm2d-6 [-1, 32, 147, 147] 64
ReLU-7 [-1, 32, 147, 147] 0
BasicConv2d-8 [-1, 32, 147, 147] 0
Conv2d-9 [-1, 64, 147, 147] 18,432
BatchNorm2d-10 [-1, 64, 147, 147] 128
ReLU-11 [-1, 64, 147, 147] 0
BasicConv2d-12 [-1, 64, 147, 147] 0
Conv2d-13 [-1, 96, 73, 73] 55,296
BatchNorm2d-14 [-1, 96, 73, 73] 192
ReLU-15 [-1, 96, 73, 73] 0
BasicConv2d-16 [-1, 96, 73, 73] 0
MaxPool2d-17 [-1, 64, 73, 73] 0
Conv2d-18 [-1, 64, 73, 73] 10,240
BatchNorm2d-19 [-1, 64, 73, 73] 128
ReLU-20 [-1, 64, 73, 73] 0
BasicConv2d-21 [-1, 64, 73, 73] 0
Conv2d-22 [-1, 96, 71, 71] 55,296
...
Forward/backward pass size (MB): 940.05
Params size (MB): 485.57
Estimated Total Size (MB): 1426.65
Train
Train Function
# define loss function and optimizer
loss_func = nn.CrossEntropyLoss(reduction='sum')
opt = optim.Adam(model.parameters(), lr=0.001)
from torch.optim.lr_scheduler import ReduceLROnPlateau
lr_scheduler = ReduceLROnPlateau(opt, mode='min', factor=0.1, patience=10)
# function to get current learning rate
def get_lr(opt):
for param_group in opt.param_groups:
return param_group['lr']
# function to calculate metric per mini-batch
def metric_batch(output, target):
pred = output.argmax(1, keepdim=True)
corrects = pred.eq(target.view_as(pred)).sum().item()
return corrects
# function to calculate loss per mini-batch
def loss_batch(loss_func, output, target, opt=None):
loss_b = loss_func(output, target)
metric_b = metric_batch(output, target)
if opt is not None:
opt.zero_grad()
loss_b.backward()
opt.step()
return loss_b.item(), metric_b
# function to calculate loss per epoch
def loss_epoch(model, loss_func, dataset_dl, sanity_check=False, opt=None):
running_loss = 0.0
running_metric = 0.0
len_data = len(dataset_dl.dataset)
for xb, yb in dataset_dl:
xb = xb.to(device)
yb = yb.to(device)
output = model(xb)
loss_b, metric_b = loss_batch(loss_func, output, yb, opt)
running_loss += loss_b
if metric_b is not None:
running_metric += metric_b
if sanity_check is True:
break
loss = running_loss / len_data
metric = running_metric / len_data
return loss, metric
# function to start training
def train_val(model, params):
num_epochs=params['num_epochs']
loss_func=params["loss_func"]
opt=params["optimizer"]
train_dl=params["train_dl"]
val_dl=params["val_dl"]
sanity_check=params["sanity_check"]
lr_scheduler=params["lr_scheduler"]
path2weights=params["path2weights"]
loss_history = {'train': [], 'val': []}
metric_history = {'train': [], 'val': []}
best_loss = float('inf')
start_time = time.time()
for epoch in range(num_epochs):
current_lr = get_lr(opt)
print('Epoch {}/{}, current lr={}'.format(epoch, num_epochs-1, current_lr))
model.train()
train_loss, train_metric = loss_epoch(model, loss_func, train_dl, sanity_check, opt)
loss_history['train'].append(train_loss)
metric_history['train'].append(train_metric)
model.eval()
with torch.no_grad():
val_loss, val_metric = loss_epoch(model, loss_func, val_dl, sanity_check)
loss_history['val'].append(val_loss)
metric_history['val'].append(val_metric)
if val_loss < best_loss:
best_loss = val_loss
print('Get best val_loss!')
lr_scheduler.step(val_loss)
print('train loss: %.6f, val loss: %.6f, accuracy: %.2f, time: %.4f min' %(train_loss, val_loss, 100*val_metric, (time.time()-start_time)/60))
print('-'*10)
return model, loss_history, metric_history
Hyper Parameters
# definc the training parameters
params_train = {
'num_epochs':5,
'optimizer':opt,
'loss_func':loss_func,
'train_dl':train_dl,
'val_dl':val_dl,
'sanity_check':False,
'lr_scheduler':lr_scheduler,
'path2weights':'./models/weights.pt',
}
# create the directory that stores weights.pt
def createFolder(directory):
try:
if not os.path.exists(directory):
os.makedirs(directory)
except OSerror:
print('Error')
createFolder('./models')
Train
model, loss_hist, metric_hist = train_val(model, params_train)
Epoch 0/4, current lr=0.001
Get best val_loss!
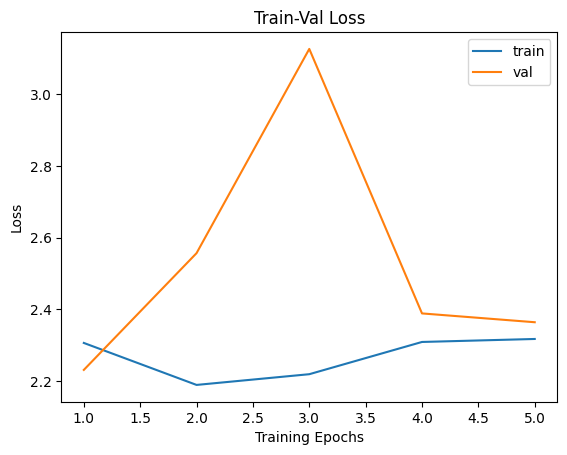
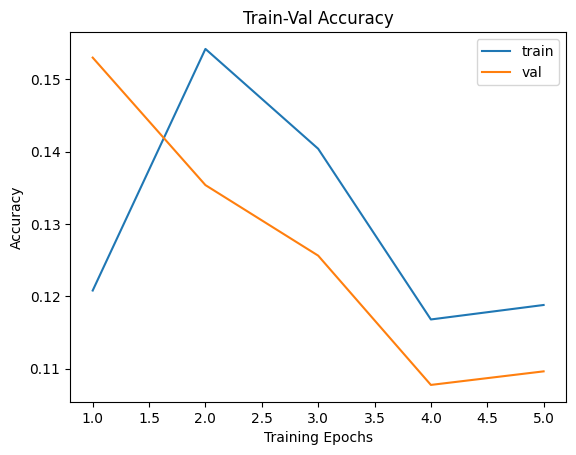
train loss: 2.306605, val loss: 2.231432, accuracy: 15.30, time: 5.8292 min
----------
Epoch 1/4, current lr=0.001
train loss: 2.189562, val loss: 2.556953, accuracy: 13.54, time: 11.6434 min
----------
Epoch 2/4, current lr=0.001
train loss: 2.219446, val loss: 3.126347, accuracy: 12.56, time: 17.9946 min
----------
Epoch 3/4, current lr=0.001
train loss: 2.309346, val loss: 2.388916, accuracy: 10.78, time: 23.9601 min
----------
Epoch 4/4, current lr=0.001
train loss: 2.317668, val loss: 2.364337, accuracy: 10.96, time: 29.7933 min
----------
Result
Loss & Accuracy Graph
# Train-Validation Progress
num_epochs=params_train["num_epochs"]
# plot loss progress
plt.title("Train-Val Loss")
plt.plot(range(1,num_epochs+1),loss_hist["train"],label="train")
plt.plot(range(1,num_epochs+1),loss_hist["val"],label="val")
plt.ylabel("Loss")
plt.xlabel("Training Epochs")
plt.legend()
plt.show()
# plot accuracy progress
plt.title("Train-Val Accuracy")
plt.plot(range(1,num_epochs+1),metric_hist["train"],label="train")
plt.plot(range(1,num_epochs+1),metric_hist["val"],label="val")
plt.ylabel("Accuracy")
plt.xlabel("Training Epochs")
plt.legend()
plt.show()
Visualize
import matplotlib.pyplot as plt
import numpy as np
model.eval()
result_images = []
result_preds = []
result_labels = []
with torch.no_grad():
for i, (images, labels) in enumerate(val_dl):
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, preds = torch.max(outputs, 1)
result_images.extend(images.cpu().numpy())
result_preds.extend(preds.cpu().numpy())
result_labels.extend(labels.cpu().numpy())
if i == 2: # 3번째 배치까지만 시각화
break
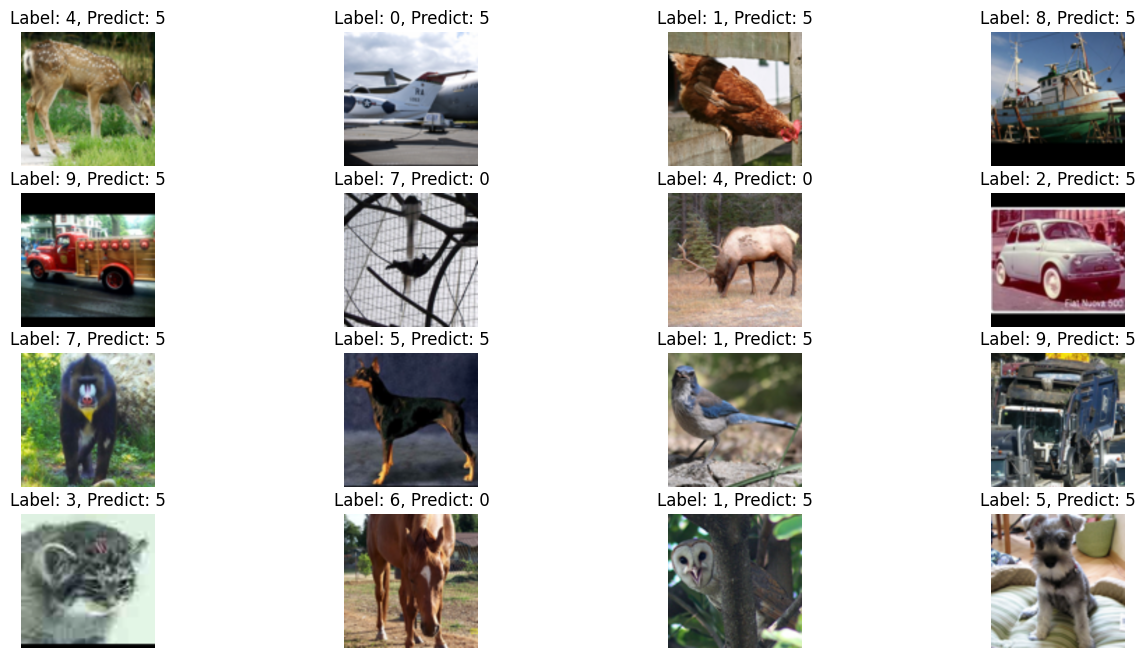
# 결과 시각화
plt.figure(figsize=(16, 8))
for i in range(16):
plt.subplot(4, 4, i+1)
img = result_images[i].transpose((1, 2, 0))
img = (img - img.min()) / (img.max() - img.min())
plt.imshow(img)
plt.title(f'Label: {result_labels[i]}, Predict: {result_preds[i]}')
plt.axis('off')
plt.show()
참고¶
- GAN - Google
- ChatGPT
- 파이토치 GAN 튜토리얼